Máquinas simples são dispositivos compostos por poucos elementos. Além disso, são capazes de alterar a magnitude de forças ou mudar seu sentido. A primeira máquina simples foi proposta por Arquimedes de Siracusa, no século III, antes da era Cristã. Veja o que são, exemplos e muito mais sobre esse tema.
Publicidade
O que são máquinas simples
As máquinas simples são a base do funcionamento de qualquer outro dispositivo mecânico mais complexo. Apesar da simplicidade, esse tipo de aparato trouxe grandes avanços para a humanidade. Isso aconteceu porque uma máquina simples é capaz de alterar a intensidade de uma força. Além disso, ela também pode mudá-la de direção ou de sentido.
Relacionadas
A concepção de uma máquina simples surgiu a partir dos estudos do grego Arquimedes de Siracusa. Nessa época, foram propostas as máquinas arquimedianas. As quais consistiam em alavancas, polias e parafusos. Atualmente, considera-se três tipos de máquinas simples. Veja quais são elas, a seguir.
Os 3 tipos de máquina simples
Ao longo dos anos, a definição de máquina simples foi mudando. Dessa forma, desde a Grécia antiga até os dias atuais alguns equipamentos passaram a ser considerados e outros deixaram de se enquadrar nessa categoria. Atualmente, são considerados três tipos de máquinas simples.
Alavancas
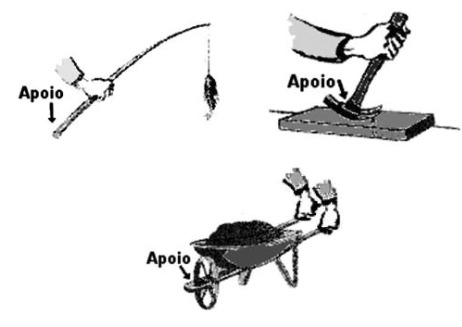
As alavancas são consideradas multiplicadoras de força. Afinal, com elas é possível aumentar a vantagem mecânica. Por exemplo, soltar um parafuso que estava muito apertado com uma chave ou espremer um limão muito mais rápido usando a alavanca do espremedor. Além disso, dependendo do local de ação da força, a alavanca recebe um nome.
- Interfixa: o ponto de apoio fica entre a aplicação da força potente e o ponto da força resistente.
- Interpotente: o ponto de aplicação da força potente fica entre o ponto de apoio e a força resistente.
- Inter-resistente: a força resistente fica entre o ponto de apoio e a força potente.
Roldanas ou polias
Esse aparato são rodas que servem para direcionar a força por meio de objetos específicos. Ou seja, usando cordas ou fios é possível desviar a trajetória ou levantar certos corpos. Por exemplo, roldanas são usadas para erguer objetos pesados na construção civil e em aparelhos de academia. Veja os tipos de roldanas existentes:
Publicidade
- Fixa: deve ficar presa a um lugar fixo. Ela apenas muda a direção da força aplicada. Assim, a força é aplicada é igual à força na outra extremidade da corda.
- Móvel: ao associar roldanas fixas com roldanas móveis, a força aplicada se multiplica. Assim, essa associação muda a direção da força e a multiplica.
Plano inclinado
Como o próprio nome diz, esse sistema é um plano que liga duas alturas diferentes. Como uma rampa. Dessa maneira, o plano inclinado se constitui como uma máquina simples porque a força necessária para elevar um objeto entre dois níveis, por meio do plano, é muito menor do que se o movimento fosse feito na vertical. Os exemplos de plano inclinado podem ser uma rampa de acesso ou uma rampa de carga e descarga.
A combinação desses conceitos físicos pode gerar máquinas mais complexas. Por exemplo, motores de carros, bicicletas e muitas outras.
Vídeos sobre máquinas simples
Além de aprender os tipos e os conceitos por trás dos aparelhos fundamentais da dinâmica, é preciso aprofundar os conhecimentos. Por isso, assista aos vídeos selecionados e veja mais sobre cada tipo de máquina.
Publicidade
Plano inclinado sem atrito
O professor Marcelo Boaro explica os cálculos por trás de um plano inclinado sem atrito. Para isso, o docente explica a decomposição da força peso em termos dos senos e cossenos. Além disso, no vídeo, Boaro encontra uma relação matemática para a aceleração no plano inclinado sem atrito. Ao fim da aula, o professor resolve um exercício de aplicação.
Qual a diferença entre roldana fixa e móvel
As roldanas também são conhecidas como polias. Esse tipo de aparelho é responsável por mudar a direção da força aplicada e diminuir a força necessária para erguer um corpo. Para saber mais sobre a diferença entre os tipos de polia, veja o vídeo do canal Chama o Físico.
Alavancas e torque
Conhecer as alavancas e o torque é fundamental para compreender a estática de um corpo extenso. Por isso, o professor Marcelo Boaro conta como calcular o momento de uma força, que também é conhecido como torque. Dessa forma, o docente consegue explicar as diferenças entre os três tipos de alavanca. Ao fim do vídeo, o professor resolve um exercício de aplicação.
Conhecer as máquinas simples é importante no estudo da dinâmica. Afinal, com esses conceitos é possível compreender muito bem o funcionamento de diversos dispositivos que nos cercam. Além disso, é importante conhecer a história por trás desse conteúdo. Por isso, veja mais sobre um dos principais estudiosos desse tema, o grego Arquimedes.
Referências
Física I: Mecânica (2016) – YOUNG, H. D. et al.n
Física: Volume 1 (2008) – HALLIDAY, D. et al.
Curso de Física Básica: Volume 1 (2014) – NUSSENZVEIG, H. D.

Por Hugo Shigueo Tanaka
Divulgador Científico e co-fundador do canal do YouTube Ciência em Si. Historiador da Ciência. Professor de Física e Matemática. Licenciado em Física pela Universidade Estadual de Maringá (UEM). Mestre em Ensino de Ciências e Matemática (PCM-UEM). Doutorando em Ensino de Ciências e Matemática (PCM-UEM).
Tanaka, Hugo Shigueo. Máquinas simples. Todo Estudo. Disponível em: https://www.todoestudo.com.br/fisica/maquinas-simples. Acesso em: 03 de April de 2025.
1. [Uece]
Uma gangorra em um parquinho infantil é ocupada por dois gêmeos idênticos e de mesma massa, Cosmo e Damião. Na brincadeira, enquanto um dos irmãos sobe em um dos acentos do brinquedo, o outro desce no outro acento. O brinquedo pode ser descrito como uma haste rígida, com um acento em cada extremidade, e livre para girar em um plano vertical em torno do ponto central. Considere os torques na haste da gangorra exercidos pelas forças peso de Cosmo (τc) e de Damião (τd), em relação ao ponto central. Na configuração em que Cosmo está na posição mais alta, é correto afirmar que
a) |τc| < |τd|.
b) |τc| = |τd|.
c) |τc| > |τd|.
d) |τc| >- |τd|.
Alternativa correta: B
Como as massas dos irmãos é a mesma e ambos estão à mesma distância do ponto de apoio, o torque de ambos será igual.
2. [IFSP]
No nosso cotidiano, as alavancas são frequentemente utilizadas com o objetivo de facilitar algum trabalho ou para dar alguma vantagem mecânica, multiplicando uma força. Dependendo das posições relativas do ponto fixo ou de apoio de uma alavanca (fulcro) em relação às forças potente e resistente, elas podem ser classificadas em três tipos: interfixas, interpotentes e inter-resistentes. As figuras mostram os três tipos de alavancas.
As situações A, B e C, nessa ordem representam alavancas classificadas como
a) inter-resistente, interpotente e interfixa.
b) interpotente, inter-resistente e interfixa.
c) interpotente, interfixa e inter-resistente.
d) interfixa, inter-resistente e interpotente.
e) interfixa, interpotente e inter-resistente.
Alternativa correta: C
Na situação A a alavanca é interpotente.
Na situação B a alavanca é interfixa.
Na situação C a alavanca é inter-resistente.